Um robô bem curioso, a prova de água: o peixe robótico. Esse protótipo está em exibição em um aquário, nos Estados Unidos.
domingo, 31 de agosto de 2008
sexta-feira, 29 de agosto de 2008
Máquinas simples 2: Roldanas
Alguma vez você já reparou na extremidade de um guindaste, uma grua motorizada, a montagem de uma vela náutica ou algum equipamento de musculação? Se a sua resposta for sim, então você já deve ter presenciado o funcionamento de um sistema de roldanas.
Uma roldana é uma roda (ou carretilha) que pode girar em torno de um eixo, tendo um sulco em volta (como um carretel achatado) pelo qual passa uma corda. Trata-se de uma combinação de cordas e polias que permitem trocar força por distância.
Podemos utilizar as roldanas de diferentes maneiras:
Uma roldana fixa muda a direção de uma força
Exemplo: Imagine que você tenha um peso total de 45 kg suspenso por uma corda, como mostrado abaixo:
Uma roldana é uma roda (ou carretilha) que pode girar em torno de um eixo, tendo um sulco em volta (como um carretel achatado) pelo qual passa uma corda. Trata-se de uma combinação de cordas e polias que permitem trocar força por distância.
Podemos utilizar as roldanas de diferentes maneiras:
Uma roldana fixa muda a direção de uma força
Exemplo: Imagine que você tenha um peso total de 45 kg suspenso por uma corda, como mostrado abaixo:

Para suspender este peso é preciso aplicar uma força dirigida para cima de 45 kg na corda. Se esta corda tiver 30 metros de comprimento e o seu objetivo for levantar este peso até uma altura de 30 metros, será preciso puxar a corda até esta altura.
Agora, imagine que você acrescente uma polia ao conjunto:

Isso muda alguma coisa? Na verdade, não. A única mudança é a direção da força necessária para que o peso seja levantado. Ainda será necessário aplicar 45 kg de força para manter esse peso erguido e puxar os 30 metros da corda para alcançar essa mesma altura.
Uma roldana fixa muda a direção de uma força.
Uma roldana móvel aumenta a força
A figura abaixo mostra como ficaria a disposição após a adição de uma segunda polia:

Essa nova disposição provoca mudanças significativas. Como você pode ver, o peso agora está suspenso por 2 polias. Com isso, o peso total é dividido entre elas, ou seja, cada uma delas suporta apenas metade do peso total, ou 22,75 kg. Nesse caso, se você quiser manter este peso suspenso no ar, precisará aplicar apenas os 22,75 kg de força (o suporte no teto aplicará a metade restante da força na outra extremidade da corda). Se quiser erguer esse peso por 30 metros, precisará puxar um comprimento de corda duas vezes maior que o comprimento necessário no sistema anterior, ou seja, 60 metros nesse caso. Isso demonstra uma relação entre força e distância. A força necessária diminuiu pela metade, enquanto o comprimento da corda dobrou.
Combinação de roldanas

Nesse caso, a polia ligada ao peso é formada, na verdade, por 2 polias diferentes montadas no mesmo eixo, como mostrado abaixo. Esse arranjo reduz novamente a força pela metade e dobra a distância necessária. Logo, para manter o peso suspenso no ar, é necessário aplicar uma força de apenas 11,375 kg.

Agora vai o desafio: Para levantar o peso da figura acima 30 metros, são necessários quantos metros de corda?
Importante: O sistema de roldanas pode conter tantas polias quanto desejado. No entanto, com um número de polias muito grande o atrito no eixo dessas polias começa a se tornar uma fonte de resistência significativa.
quinta-feira, 28 de agosto de 2008
OBR - Prova Teórica Nível 1 e 2
Já foram lançadas todas as notas do alunos que fizeram a prova teórica nível 1 (1º, 2º e 3º ano, antigas alfabetização, 1ª e 2ª série) e nível 2 (4º, 5º e 6º anos, antigas 3ª, 4ª e 5ª séries) da Olimpíada Brasileira de Robótica.
Desde já parabenizamos a todos e todas que participaram independentemente da classificação nacional e em destaque as alunas Agatha Moura, Brenda Oliveira e Sofia Malta da 4ª série A, que obtiveram as melhores notas no nível 2 (80 pontos) e o aluno Gabriel Henrique da 1ª série B, o qual foi o único aluno do nível 1 a participar da Olimpíada e se destacou alcançando 76 pontos!
Parabéns!
Desde já parabenizamos a todos e todas que participaram independentemente da classificação nacional e em destaque as alunas Agatha Moura, Brenda Oliveira e Sofia Malta da 4ª série A, que obtiveram as melhores notas no nível 2 (80 pontos) e o aluno Gabriel Henrique da 1ª série B, o qual foi o único aluno do nível 1 a participar da Olimpíada e se destacou alcançando 76 pontos!
Parabéns!
quarta-feira, 27 de agosto de 2008
Por espaços estreitos: conheça a cobra-robótica
Mais ou menos uma semana atrás, eu postei um comentário sobre robôs que simulavam o movimento de animais e dei destaques aos vídeos de robôs que simulavam os movimentos de ofídios (cobras e serpentes).
Ontem, uma empresa anunciou a construção de um robô-cobra de seis metros de comprimento e espessura de 1,25 cm, que pode ser utilizado para acessar locais estreitos, a partir de um controlador. A matéria completa está postada abaixo.
Ontem, uma empresa anunciou a construção de um robô-cobra de seis metros de comprimento e espessura de 1,25 cm, que pode ser utilizado para acessar locais estreitos, a partir de um controlador. A matéria completa está postada abaixo.
Tecnologia 26/08/2008 10h32min
Empresa apresenta cobra robótica de seis metrosProjeto da OC Robotics é flexível e consegue acessar qualquer lugar
A empresa OC Robotics apresentou um robô que lembra uma cobra e que é capaz de entrar em espaços muito estreitos, fazendo curvas e transmitindo imagens dos locais por onde passa.
Batizado de Snake-Arm (braço-cobra), o novo robô tem um diâmetro de 1,25 centímetro (menor que uma moeda de R$ 0,50) e 6,1 metros de comprimento (comprimento médio de uma sucuri). Ele não é autônomo, operando "ancorado" a partir de seu "ninho."
O robô é flexível ao longo de todo o seu corpo, sem joelhos ou cotovelos. Isso permite que ela siga em frente mesmo quando há curvas em seqüência e em locais muito estreitos.
O nariz do robô possui uma câmera, protegida por um hemisfério de policarbonato. A câmera, dotada de iluminação própria, envia continuamente imagens para o computador conectado ao ninho do robô.
Já existem vários robôs flexíveis para aplicações industriais, voltados principalmente para a inspeção de dutos. Mas eles ainda não possuem a flexibilidade necessária para entrar em locais muito estreitos. Por outro lado, existem os endoscópios, muito usados em medicina, mas que são muito frágeis e difíceis de manobrar em ambientes industriais.
O robô Snake-Arm está em um ponto intermediário entre estas duas soluções, sendo flexível, controlável e resistente o suficiente para operar em virtualmente qualquer situação.
Fonte: INOVAÇÃO TECNOLÓGICA, http://www.clicrbs.com.br/especiais/jsp/default.jsp?template=2095.dwt&newsID=a2141851.htm&tab=00052&order=datepublished&espid=56§ion=Not%EDcias&subTab=04439Exoesqueleto permite que pessoas paralisadas andem e até subam escadas
Paralisado há 20 anos, Radi Kaiof, ex-pára-quedista do Exército israelense, agora anda pelas ruas fazendo um zumbido baixo e mecânico. É o som de um exoesqueleto eletrônico movendo as pernas do homem de 40 anos e, por propulsão, levando à frente – com uma expressão de orgulho estampado no rosto, enquanto outros pedestres o fitam com surpresa.
– Nunca sonhei que andaria de novo. Depois que me feriram, esqueci como era andar – disse Kaiof, lesionado enquanto servia no Exército, em 1988.
– Só quando fico em pé é que consigo ter consciência de minha altura e conversar com as pessoas, olhos nos olhos, não de baixo pra cima.
O aparelho, chamado de ReWalk, é a invenção principal do engenheiro Amit Goffer, fundador da Argo Medical Technologies, uma pequena empresa israelense que vende produtos de alta tecnologia.
Algo entre o exoesqueleto de um crustáceo e o uniforme usado pelo herói das histórias em quadrinhos o Homem de Ferro, o ReWalk ajuda os paraplégicos – pessoas paralisadas abaixo da cintura – a ficarem de pé, andarem e subirem escadas.
O próprio Goffer ficou paralisado durante um acidente em 1997. Mas não pode usar sua própria invenção por não ter completo controle das funções dos braços.
O sistema, que requer muletas para ajudar no equilíbrio, consiste de suportes de perna motorizados, sensores do corpo e uma mochila contendo uma caixa de controle computadorizada e baterias recarregáveis.
O usuário escolhe um comando através de uma pulseira com controle remoto – levantar, sentar, andar, descer ou subir – e se inclina para frente, ativando os sensores corporais e iniciando o movimento das pernas robóticas.
– O ReWalk levanta as pessoas de suas cadeiras de rodas e permite que fiquem de pé, eretas – disse Goffer. – Não tem a ver só com saúde, mas com dignidade também.
Kate Parkin, diretora de terapia física e ocupacional no Centro Médico da Universidade de Nova York, disse que o aparelho tem o potencial de melhorar a saúde de duas maneiras.
– Fisicamente, o corpo trabalha de forma diferente quando está ereto. Você pode desafiar músculos diversos e permitir a expansão completa dos pulmões – disse Parkin. – Psicologicamente, ele permite que as pessoas vivam de forma perpendicular e façam contato com os olhos dos outros.
Venda em 2010
O ReWalk, listado para vendas comerciais em 2010, custará o mesmo que as mais sofisticadas cadeiras de rodas do mercado, vendidas atualmente por cerca de US$ 20 mil (cerca de R$ 32 mil).
O ReWalk está atualmente em fase de testes clínicos no Centro Médico Sheba, em Tel Aviv, e Goffer disse que logo também será testado no Instituto de Pesquisas de Reabilitação, na Pensilvânia, nos EUA.
Tecnologias rivais utilizam estímulos elétricos para restaurar funções aos músculos danificados. Mas outras “roupas de robô”, como as desenvolvidas pelo Exército americano e pela empresa robótica japonesa HAL, não são adequadas nem funcionam em pessoas com deficiência motora.
(Ari Rabinovitch, REUTERS)
Fonta da reportagem: http://jbonline.terra.com.br/extra/2008/08/26/e26086552.html
terça-feira, 26 de agosto de 2008
Motores utilizados em robótica - parte II
Motor de corrente alternada (AC)
O motor de corrente alternada (AC) é um dispositivo destinado à conversão de energia elétrica em energia mecânica e o seu funcionamento baseia-se nas leis de Ampère, Faraday e Lenz, do eletromagnetismo. De um modo geral, sabe-se que quando uma corrente elétrica atravessa um fio condutor surge nas proximidades do fio um campo magnético cuja densidade pode ser calculada pela lei de Ampère.
Se uma superfície metálica é submetida à presença deste campo magnético surgem correntes circulares induzidas que tendem a contrapor qualquer variação do fluxo magnético, de acordo com a lei de Faraday-Lenz. Estas correntes interagem com o campo e dão origem a forças magnéticas atuando sobre o corpo metálico.
Se um campo magnético for aplicado em uma direção tal, que forme um ângulo não nulo com a reta normal às áreas das espiras, a força magnética induzida sobre o corpo metálico tenderá a alinhar a normal da espira com o vetor densidade de campo. Sendo assim, se a superfície metálica for presa a um eixo e submetida à presença de um campo magnético girante, perpendicular a o eixo, surgirá na superfície metálica um movimento giratório e teremos um motor elétrico.
Para criar um vetor densidade de campo magnético girante de módulo constante é necessária a utilização de bobinas alimentadas por correntes AC, composto por enrolamentos separados por um ângulo de 90º e um rotor metálico.
Devido o seu funcionamento não ser tão complexo, ele é utilizado em uma grande gama de aplicações na indústria e em residências; tem-se, por exemplo, o liquidificador, enceradeiras, serras e lixadeiras que são aparelhos que utiliza motor AC, geralmente ele é utilizado como motor de baixa potência.
A grande vantagem do motor AC é poder ser ligado diretamente à rede elétrica residencial.
Sua desvantagem é o grande peso do motor, por conta das bobinas.
Desafio: Por que o motor AC pode ser ligado diretamente na rede elétrica residencial?
(postagem escrita por Lucas Henrique Santos)
Motores utilizados em robótica - parte I
Motor de passo ou servomotor
Motor de passo é um tipo de motor elétrico que é usado quando algo tem que ser posicionado muito precisamente ou rotacionado em um ângulo exato.
Motor de passo é um tipo de motor elétrico que é usado quando algo tem que ser posicionado muito precisamente ou rotacionado em um ângulo exato.
Em um motor de passo, um ímã permanente, muito forte, é controlado por uma série de campos eletromagnéticos que são ativados e desativados eletronicamente. Desse modo, é uma mistura entre um motor de corrente contínua e um solenóide.

Motores de passo não usam escovas ou comutadores e possuem um número fixo de pólos magnéticos que determinam o número de passos por revolução. Os motores de passo mais comuns possuem de 3 a 72 passos/revolução, significando que ele leva de 3 a 72 passos para completar uma volta. Controladores avançados de motores de passo podem utilizar modulação por largura de pulso para realizarem micropassos, obtendo uma maior resolução de posição e operação mais macia.
Os motores de passo são classificados pelo torque que produzem. Uma característica única deste tipo de motor é a sua habilidade de poder manter o eixo em uma posição segurando o torque sem estar em movimento. Para atingir todo o seu torque, suas bobinas devem receber toda a corrente marcada durante cada passo. Os seus controladores devem possuir circuitos reguladores de corrente para poderem fazer isto. A marcação de tensão (se houver) é praticamente sem utilidade.
O controle computadorizado de motores de passo é uma das formas mais versáteis de sistemas de posicionamento, particulamente quando digitalmente controlado como parte de um servo sistema. Os motores de passo são usados em drives de disquete, scanners planos, impressoras, injeção eletrônica nos automóveis, antenas parabólicas e muitos outros dispositivos.
Mais imformações no site: http://www.cncmania.com.br/site/artigos_motor_de_passo.asp
O solenóide do topo (1) esta ativado, atraindo o dente superior do eixo.

O solenóide do topo (1) é desativado, e o solenóide da direita (2) é ativado, movendo o quarto dente mais próximo à direita. Isto resulta em uma rotação de 3.6°.

O solenóide inferior (3) é ativado; outra rotação de 3.6° ocorre.

O solenóide à esquerda (4) é ativado, rodando novamente o eixo em 3.6°.

Desafio: Quando o solenóide do topo (1) for ativado novamente, o eixo terá rodado em um dente de posição, como existem 25 dentes, serão necessários, Quantos passo para uma rotação completa? Lembrando que os passos são de solenóide a solenóide.
(postagem escrita por Lucas Henrique Santos)
segunda-feira, 25 de agosto de 2008
A evolução do RCX: o NXT!
Considerado a evolução do Robotic Commander Explorer (RCX), o novo CLP (controlador lógico programável) denominado NXT tem dominado cada vez mais o mundo da robótica Lego®, além de apresentar mais sensores, portas, etc. O NXT apresenta várias outras qualidades.

Como no Robolab, o software de programação do NXT também inclui o modo de programação “iconizada” (feita por ícones). Ainda assim, é possível programá-lo em NQC (uma linguagem textual).
Outra qualidade do NXT é a montagem. Quando feita uma por um bom construtor, uma montagem com NXT fica muito boa, não é a toa que na FLL (First Lego League) cada vez mais equipes tem usado o NXT. Principalmente pela variedade enorme de Sensores, o NXT possui sensores de: Luz, toque, ultra-som, rotação e muitos outros tipos.
O kit do NXT é o Mindstorms 8527, e é provável que cada vez mais escolas o adaptem nas aulas de robótica. Enquanto o RCX sai de linha, o NXT vai crescendo e se mostrando cada vez mais a melhor “arma” da robótica Lego®.
Algumas características do NXT
Processador Atmel 32-bit ARM;
Três portas de saída digital;
Quatro portas de entrada (uma IEC 61158, tipo 4);
Display tipo matriz;
Bateria recarregável de lítio;
Porta de Comunicação USB 2.0;
Três servo-motores interativos (com encoder acoplado);
Programa de computador intuitivo com uma versão LEGO do LabVIEW;
Compatível com PCs e com MACs.
Desafio fácil para quem conhece o NXT: qual sensor está “embutido”no motor do NXT?

(Postagem escrita por Guilherme Jacobs)
domingo, 24 de agosto de 2008
Máquinas Simples 1: Alavancas
Quando você ouve a palavra máquina provavelmente pensa em mecanismos complicados como máquinas de lavar roupas, de costura, de escrever, calculadoras, etc. Tais máquinas complexas são combinações de seis tipos de máquinas simples: a alavanca, a roldana, o plano inclinado, a rodo e eixo, o parafuso e a cunha.
A alavanca é uma barra que pode girar em torno de um ponto de apoio. Quando você usa um pedaço de pau para deslocar uma pedra, um quebra-nozes para abrir castanhas ou uma pinça de confeitaria para pegar um doce você está usando uma alavanca.
As alavancas podem ser divididas em três classes:
Alavancas da primeira classe (interfixas) - o ponto de apoio está entre o ponto de aplicação da força de ação e o da força de resistência;

Alavancas de segunda classe (inter-resistentes) - o ponto de aplicação da força de resistência está entre o da força de ação e o ponto de apoio;

Alavancas da terceira classe (interpotentes) – o ponto de aplicação da força de ação está entre o de resistência e o ponto de apoio.

Mas como saber a vantagem mecânica de uma alavanca?

Obtendo a relação entre a distância de ação e a distância de resistência:

Dividindo o braço de ação (distância entre o ponto de apoio e a força de ação) pelo braço de resistência (distância entre o ponto de apoio e a força de resistência).
V.M = 60 / 30 = 2
Atenção! Nenhuma alavanca pode aumentar tanto a força de ação quanto a distância movida, ao mesmo tempo. Quanto maior o braço da resistência menor a vantagem mecânica. Quanto maior a distância de resistência menor a vantagem mecânica.
Exemplo:

V.M = 30 / 90 = 1/3
Neste caso a vantagem mecânica é menor que 1.
Com base nisso, também podemos obter a vantagem mecânica de uma alavanca quando dividimos a Força de resistência pela Força de ação.
Por exemplo: Suponha que você use uma barra para deslocar uma pedra pesando 80kg*. Se o braço de ação da barra é de 1,50m e o braço de resistência de 30cm que fôrça você deve exercer? 80 kg* = Força de resistência (fR) 30 cm = Braço de resistência (BR) 150 cm = Braço de ação (BA) Determinar a fôrça de ação (fA):
V.M = B.A/ B.R = 150 cm/ 30 cm = 5
V.M = f.R/ f.A
5 = 80 Kg/ f.A
5 f.A = 80Kg
f.A = 80 kg/ 5
f.A = 16 Kg
Agora, um desafio para você:
Você exerce uma força de ação de 30kg num ponto a 50cm do apoio de uma alavanca. Que carga você pode levantar se a mesma está colocada a 10cm do ponto de apoio, no lado oposto?
A alavanca é uma barra que pode girar em torno de um ponto de apoio. Quando você usa um pedaço de pau para deslocar uma pedra, um quebra-nozes para abrir castanhas ou uma pinça de confeitaria para pegar um doce você está usando uma alavanca.
As alavancas podem ser divididas em três classes:
Alavancas da primeira classe (interfixas) - o ponto de apoio está entre o ponto de aplicação da força de ação e o da força de resistência;

Alavancas de segunda classe (inter-resistentes) - o ponto de aplicação da força de resistência está entre o da força de ação e o ponto de apoio;

Alavancas da terceira classe (interpotentes) – o ponto de aplicação da força de ação está entre o de resistência e o ponto de apoio.

Mas como saber a vantagem mecânica de uma alavanca?

Obtendo a relação entre a distância de ação e a distância de resistência:
V.M = 2 / 1 = 2

Dividindo o braço de ação (distância entre o ponto de apoio e a força de ação) pelo braço de resistência (distância entre o ponto de apoio e a força de resistência).
V.M = 60 / 30 = 2
Atenção! Nenhuma alavanca pode aumentar tanto a força de ação quanto a distância movida, ao mesmo tempo. Quanto maior o braço da resistência menor a vantagem mecânica. Quanto maior a distância de resistência menor a vantagem mecânica.
Exemplo:

V.M = 30 / 90 = 1/3
Neste caso a vantagem mecânica é menor que 1.
Com base nisso, também podemos obter a vantagem mecânica de uma alavanca quando dividimos a Força de resistência pela Força de ação.
Por exemplo: Suponha que você use uma barra para deslocar uma pedra pesando 80kg*. Se o braço de ação da barra é de 1,50m e o braço de resistência de 30cm que fôrça você deve exercer? 80 kg* = Força de resistência (fR) 30 cm = Braço de resistência (BR) 150 cm = Braço de ação (BA) Determinar a fôrça de ação (fA):
V.M = B.A/ B.R = 150 cm/ 30 cm = 5
V.M = f.R/ f.A
5 = 80 Kg/ f.A
5 f.A = 80Kg
f.A = 80 kg/ 5
f.A = 16 Kg
Agora, um desafio para você:
Você exerce uma força de ação de 30kg num ponto a 50cm do apoio de uma alavanca. Que carga você pode levantar se a mesma está colocada a 10cm do ponto de apoio, no lado oposto?
Experiências eletrônicas: sensor de infravermelho

Um sensor de infravermelho pode ser utilizado para detectar a presença de objetos à frente, como um robô adversário numa competição.
Os componentes básicos consistem em um LED emissor de infravermelho e em outro, receptor.
Construí um sensor baseado nesses dois LEDs, um resistor de 500 ohms e um multímetro para verificar como varia a resistência do sistema, quando se aproxima de algum objeto.

O vídeo abaixo mostra o resultado de minha experiência:
A agulha do multímetro move-se com a aproximação da mão. Isso significa que o sistema detecta a aproximação, pois há variação da resistência. Existe redução da intensidade da corrente no circuito, já que a resistência cresce com a aproximação.
Os componentes básicos consistem em um LED emissor de infravermelho e em outro, receptor.
Construí um sensor baseado nesses dois LEDs, um resistor de 500 ohms e um multímetro para verificar como varia a resistência do sistema, quando se aproxima de algum objeto.

O vídeo abaixo mostra o resultado de minha experiência:
A agulha do multímetro move-se com a aproximação da mão. Isso significa que o sistema detecta a aproximação, pois há variação da resistência. Existe redução da intensidade da corrente no circuito, já que a resistência cresce com a aproximação.
 Valor da resistência sem aproximação da mão
Valor da resistência sem aproximação da mão Valor da resistência quando a mão se aproxima.
Valor da resistência quando a mão se aproxima.Abaixo está um esquema para que todos possam entender o funcionamento:

Ao trocar a resistência do sistema por uma maior (utilizei uma de 3000 ohms), a distância de detecção diminui e o sistema torna-se menos sensível.
Desafio: com que resistência a distância de detecção do objeto seria a maior possível?
Uma introdução aos microcontroladores PIC
Os microcontroladores merecem um capítulo à parte na história dos componentes eletrônicos. Eles são constituídos pela combinação de acessórios (como memória) ao microprocessador, transformando os microcontroladores em cérebro e coração ao mesmo tempo.
Dentre os microcontroladores, destacam-se aqueles pertencentes à família PIC, fabricados pela Microchip Technology. Esses microcontroladores podem ser programados em Assembly ou mesmo em linguagens de alto nível, como Pascal, C e Basic, a partir de códigos hexadecimais criados pelos ambientes de programação.
 Microprocessador PIC 16F628A
Microprocessador PIC 16F628AExiste uma interface de gravação que possibilita conectar um PC doméstico a um microprocessador PIC, possibilitando sua gravação. Por conta da facilidade, os PIC são muito utilizados na construção de robôs com materiais alternativos e de baixo custo.
Aqueles e aquelas que desejarem se aprofundar em microcontroladores PIC devem acessar o link seguinte, que apresenta um liro gratuito de vasto conteúdo sobre o tema:
http://www.mikroe.com/pt/product/books/picbook/00.htm
Desafio: acesse o Apêndice B do livro de PIC indicado no link acima, intitulado "Sistemas numéricos". Leia atentamente sobre os números hexadecimais. Você saberia transformar o número hexadecimal B2 para o sistema decimal?
Apresentando: o elétron
A robótica e eletrônica são baseadas quase que completamente nas propriedades de uma "partícula" (na verdade, uma partícula-onda, de acordo com a Mecânica Qüântica) muito especial: o elétron.
A existência do elétron foi prevista inicialmente pelo inglês George Johnstone Stoney (1826-1911), em 1891, que propôs essa denominação para a partícula de carga elementar (quer dizer a menor carga elétrica possível).
Em 1897, o também inglês Joseph-John Thomson (1856-1940) encontrou evidências experimentais da existência do elétron, através de experimentos com as chamadas "ampolas de Crookes" ou "tubos de raios catódicos". Thomson foi capaz de estimar a relação entre a massa e a carga da partícula por ele descoberta.

Com base em sua descoberta, Thomson propôs um novo modelo atômico, que incluía o elétron em sua estrutura. Atualmente, considera-se que os elétrons se movimentam numa região ao redor do núcleo, denominada eletrosfera. Na eletrosfera, os elétrons possuem energias definidas e quantizadas (isso quer dizer que apenas certos valores determinados de energia são possíveis), representadas pelo nível eletrônico. O nível eletrônico mais energético e externo ao núcleo e denominado nível ou camada de valência.
O que caracteriza um material ser ou não um bom condutor é a força de atração existente entre o núcleo e os elétrons do nível de valência. Quanto menor for a intensidade dessa atração, mais facilmente serão deslocados os elétrons desse nível e, se houverem átomos suficientes desse mesmo elemento, esse deslocamento originará uma corrente elétrica.
De forma análoga, um material é considerado um bom isolante elétrico quando os elétrons de seu nível de valência estão fortemente ligados ao núcleo. Como o deslocamento dos elétrons enfrenta uma resistência elevada, não se originará uma corrente elétrica.
Um modo prático de se determinar se um material é ou não condutor elétricoconsiste em analisar sua resistividade. Quanto maior for a resistividade, menor é a condutividade do material.

Desafio: partindo do texto acima, como pode ser definido um material semicondutor? Semicondutores são bastantes utilizados em aparelhos eletrônicos, sendo empregados na construção de diodos.
sábado, 23 de agosto de 2008

















Projetos em robótica: o mousebot
Quem inicia pelo ramo da robótica, logo quer passar a construir seus robôs caseiros, mas nem sempre sabe por onde começar.
Um dos projetos interessantes e de fácil execução, além de baixo custo, é o denominado mousebot: um robô que tem como base um mouse de bolinha (esse tipo de mouse é vendido hoje na faixa de R$ 10,00).

Esse robô utiliza um sensor de toque frontal e um sensor de luz. O mousebot é construído de forma a fugir da luz e inverter sua movimentação ao esbarrar em um objeto.
Interessados nese projeto devem acessar o seguinte site (em inglês):
Interessados nese projeto devem acessar o seguinte site (em inglês):
quarta-feira, 20 de agosto de 2008
Resistores ópticos: os fotorresistores
 O emprego de acendedor de lampiões (a foto é de 1924) foi extinto com o advento da eletricidade no meio urbano. Tentem, por um instante, vincular essa imagem aos nossos dias: acender manualmente cada poste da iluminação pública.
O emprego de acendedor de lampiões (a foto é de 1924) foi extinto com o advento da eletricidade no meio urbano. Tentem, por um instante, vincular essa imagem aos nossos dias: acender manualmente cada poste da iluminação pública.Felizmente, não é mais necessário acender cada poste de maneira individual. Também ainda não está em prática uma tecnologia que ligue ou desligue os postes a partir de um computador remoto, que controlasse seu funcionamento.
Então, como estes acendem?
Numa postagem recente, vimos como funciona um resistor elétrico. Imagine agora um resistor que tenha sua resistividade influenciada pela luz. É essa interferência da luz que torna os fotorresistores uma classe tão especial de componentes.
Um fotorresistor, também denominado LDR (Light Dependent Resistor), é constituído por um material semicondutor que tem sua condutividade aumentada em presença de luz. Normalmente, os materiais semicondutores empregados são o sulfeto de cádmio (CdS) ou o sulfeto de chumbo (PbS).

Esses mesmos LDR são utilizados em robótica na construção de sensores de luz, baseados na reflexão e absorção de luz pela superfície analisada. Quanto mais escura (e menos reflexiva) for a superfície, maior será a resistência apresentada pelo fotorresistor, que será transformada em dados para o robô pelo Controlador Lógico Programável (CLP). Esse tipo de equipamento tem baixo custo e pode ser facilmente integrado a qualquer projeto robótico.
Desafio: o CLP analisa a intensidade da corrente passando através do LDR para interpretar a luz refletida pela superfície até o sensor. Quando o LDR encontra uma superfície mais clara, o valor da intensidade de corrente deverá aumentar ou reduzir? Justifique.
Desafio: o CLP analisa a intensidade da corrente passando através do LDR para interpretar a luz refletida pela superfície até o sensor. Quando o LDR encontra uma superfície mais clara, o valor da intensidade de corrente deverá aumentar ou reduzir? Justifique.
terça-feira, 19 de agosto de 2008
Resultados do Campeonato FLL Nacional de 2008
Nesse fim de semana, 46 equipes selecionadas pelas Regionais anteriores disputaram o Campeonato Nacional de 2008 da First Lego League (FLL), baseado no "Desafio Energético". A realização do evento aconteceu na cidade de São Paulo e contou com a participação de quatro equipes pernambucanas.
Na classificação geral, temos:
1º lugar - EMEROTECOS, Espírito Santo (postei um vídeo desta equipe há um tempo atrás)
Total de 1262,54 pontos (Missões - 400; Trabalho em equipe - 277,38; Avaliação do robô - 193,50; Pesquisa - 391,67)
6º lugar - Apoio, Colégio Apoio, Pernambuco
Total de 1130,42 pontos (Missões - 400; Trabalho em equipe - 208,25; Avaliação do robô - 180,50; Pesquisa - 341,67)
29º lugar - Os defensores da Terra, Colégio Visão, Pernambuco
Total de 950,13 pontos (Missões - 300; Trabalho em equipe - 251,13; Avaliação do robô - 124,00; Pesquisa - 275,00)
35º lugar - EIA, Escola Internacional de Aldeia, Pernambuco
Total de 911,08 pontos (Missões - 295; Trabalho em equipe - 194,25; Avaliação do robô - 126,00; Pequisa - 295,83)
36º lugar - CFC, Colégio Fazer Crescer, Pernambuco
Total de 902,54 pontos (Missões - 240; Trabalho em equipe - 240,63; Avaliação do robô - 105,25; Pesquisa - 316,67)
A classificação completa pode ser acessada no seguinte endreço:
Parabéns às equipes pernambucanas pelo empenho e dedicação para este campeonato!
domingo, 17 de agosto de 2008
Vídeos de robótica
Um dos principais campos de estudo da movimentação de robôs consiste na imitação da movimentação de animais e construção de mecanismos que imitem esses movimentos.
Alguns robôs que se baseiam nesse princípio são aqueles que simulam os movimentos de uma cobra. Abaixo, alguns vídeos de robôs utilizando essa movimentação:
Desafio: considere um robô-cobra que utilize juntas de rotação para sua movimentação (apenas horizontal). Quantas juntas seriam necessárias para que esse robô se movimentasse com dez graus de liberdade?
Alguns robôs que se baseiam nesse princípio são aqueles que simulam os movimentos de uma cobra. Abaixo, alguns vídeos de robôs utilizando essa movimentação:
Desafio: considere um robô-cobra que utilize juntas de rotação para sua movimentação (apenas horizontal). Quantas juntas seriam necessárias para que esse robô se movimentasse com dez graus de liberdade?
A novidade robótica agora veio do Reino Unido: um robô com cérebro de rato
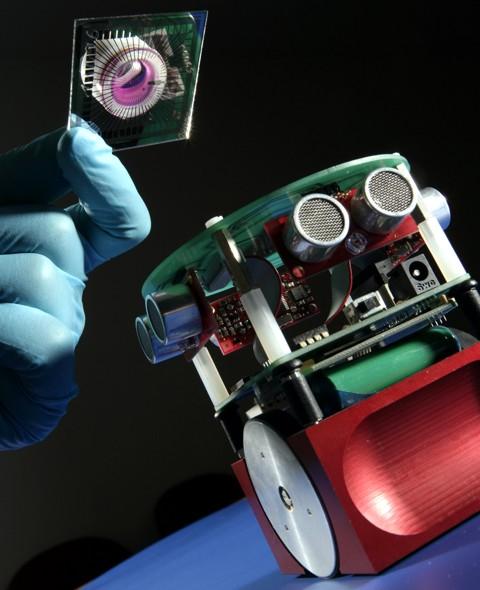
Um robô que desvia de objetos não apresentaria algo demais se não fosse o fato de nunca ter sido programado para isso e nem ser controlado por computadores ou seres humanos, mas apenas por seu próprio cérebro.
Abaixo, um vídeo do robô em funcionamento:
Cientistas da Universidade de Reading, no Reino Unido, utilizaram neurônios de rato para criar um cerébro capaz de controlar um robô. O objetivo principal dessa inovação é obter uma nova compreensão de como doenças e síndromes que atingem o cérebro (como o mal de Alzheimer, o mal de Parkinson, derrames e outras lesões cerebrais) se desenvolvem, para que possam ser tratadas.
Também é um importante passo para entender a relação entre o cérebro e a memória funciona, provavelmente o passo mais importante nesses anos em direção à construção de robôs inteligentes. São utilizados cerca de 300 mil neurônios no cérebro do robô, que realizam cada vez mais conexões entre si.
Resta apenas descobrir como o robô vai se comportar se for colocado perto de um queijo...
Desafio: os neurônios se comunicam entre si através de sinais elétricos. Qual a diferença de potencial elétrico média entre dois neurônios humanos, que possibilita essa comunicação?
Abaixo, um vídeo do robô em funcionamento:
Cientistas da Universidade de Reading, no Reino Unido, utilizaram neurônios de rato para criar um cerébro capaz de controlar um robô. O objetivo principal dessa inovação é obter uma nova compreensão de como doenças e síndromes que atingem o cérebro (como o mal de Alzheimer, o mal de Parkinson, derrames e outras lesões cerebrais) se desenvolvem, para que possam ser tratadas.
Também é um importante passo para entender a relação entre o cérebro e a memória funciona, provavelmente o passo mais importante nesses anos em direção à construção de robôs inteligentes. São utilizados cerca de 300 mil neurônios no cérebro do robô, que realizam cada vez mais conexões entre si.
Resta apenas descobrir como o robô vai se comportar se for colocado perto de um queijo...
(Fonte: http://hypescience.com/robo-cerebro-rato/)
Desafio: os neurônios se comunicam entre si através de sinais elétricos. Qual a diferença de potencial elétrico média entre dois neurônios humanos, que possibilita essa comunicação?
Resultado da modalidade prática da OBR - Pernambuco
A prova do desafio do sumô foi disputada ontem, no Instituto Helena Lubienska, no período da manhã.
As equipes disputaram rodadas contra os demais oponentes de seu nível e a classificação ficou da seguinte forma:
As equipes disputaram rodadas contra os demais oponentes de seu nível e a classificação ficou da seguinte forma:
NÍVEL 1
1º - Robotic Warriors (Lubienska)
2º - RoboTeam (Lubienska)
3º - Robolubi (Lubienska)
4º - Fire Fighters (Lubienska)
NÍVEL 2
1º - NAP 2 (NAP)
2º - NAP 1 (NAP)
3º - Dellos (Centro Experimental do Cabo de Santo de Santo Agostinho)
4º - Parafuso Elétrico (Lubienska)
Independente da colocação, o mais importante e gratificante foi ver o trabalho das equipes. O esforço de cada um no sentido de obter o melhor resultado, ainda quando as condições não eram favoráveis, ou quando tudo parecia perdido. Não pode haver decepção quando se luta contra todas as possibilidades. Que a força de vocês dure por todos os anos pela frente! Parabéns por doarem o melhor de si!
sexta-feira, 15 de agosto de 2008
Eles atacam novamente! Longa vida a "The Trons"!
Os robôs querem dominar o rock!
Mais um vídeo da banda:
Link para a página do "The Trons" no My Space: http://www.myspace.com/thtrons
Mais um vídeo da banda:
Link para a página do "The Trons" no My Space: http://www.myspace.com/thtrons
Resistindo à corrente
Não precisa conhecer muito de robôs para saber que sensores e atuadores se comunicam com o Controlador Lógico Programável por meio de sinais elétricos.
Esses sinais elétricos, que denominaremos corrente elétrica, são trabalhados por componentes específicos no interior do robô, para que se transformem em sinais digitais.
Um dos principais componentes eletrônicos de um robô (e de todos os aparelhos eletrodomésticos) é a resistência.
Esses sinais elétricos, que denominaremos corrente elétrica, são trabalhados por componentes específicos no interior do robô, para que se transformem em sinais digitais.
Um dos principais componentes eletrônicos de um robô (e de todos os aparelhos eletrodomésticos) é a resistência.

Resistência é a capacidade de um corpo de dificultar a passagem de corrente elétrica. A diferença de potencial (ddp), em Volts, entre dois pontos de um circuito elétrico, separados por resistor(es) é igual à resistência (R) vezes a intensidade de corrente elétrica (i).
ddp = R x i
Um aumento na resistência de determinada parte do circuito faz reduzir a intensidade da corrente que atravessa a parte em questão.
As resistências elétricas utilizadas em sistemas eletrônicos utilizam um código de cores padronizado para representar o valor da resistência, em Ohms. Esse código utiliza quatro faixas, dispostas do seguinte modo:
As resistências elétricas utilizadas em sistemas eletrônicos utilizam um código de cores padronizado para representar o valor da resistência, em Ohms. Esse código utiliza quatro faixas, dispostas do seguinte modo:

O código das cores é o que segue:

Para calcular o valor de uma resistência, deve-se utilizar o valor da primeira faixa como dezena, o valor da segunda faixa como unidade, e multiplicar esse valor por 10 elevado ao valor representado pela terceira faixa. A quarta faixa representa a tolerância do resistor (quanto o valor real varia em relação ao valor nominal). No exemplo abaixo:

Desafio: o circuito eletrônico de um robô utiliza um resistor que apresenta as seguintes faixas: azul, verde, marrom e dourada. Qual o valor da resistência, em Ohms, e de sua tolerância?
Assinar:
Postagens (Atom)